Am Wochenende hatte ich Gelegenheit, das SuperX Flight Control an einem Multikopter zu testen. Dabei handelt es sich um die brandneue Version aus dem Hause Xaircraft, welche über den offiziellen Distributer meinkopter.de bezogen werden kann.
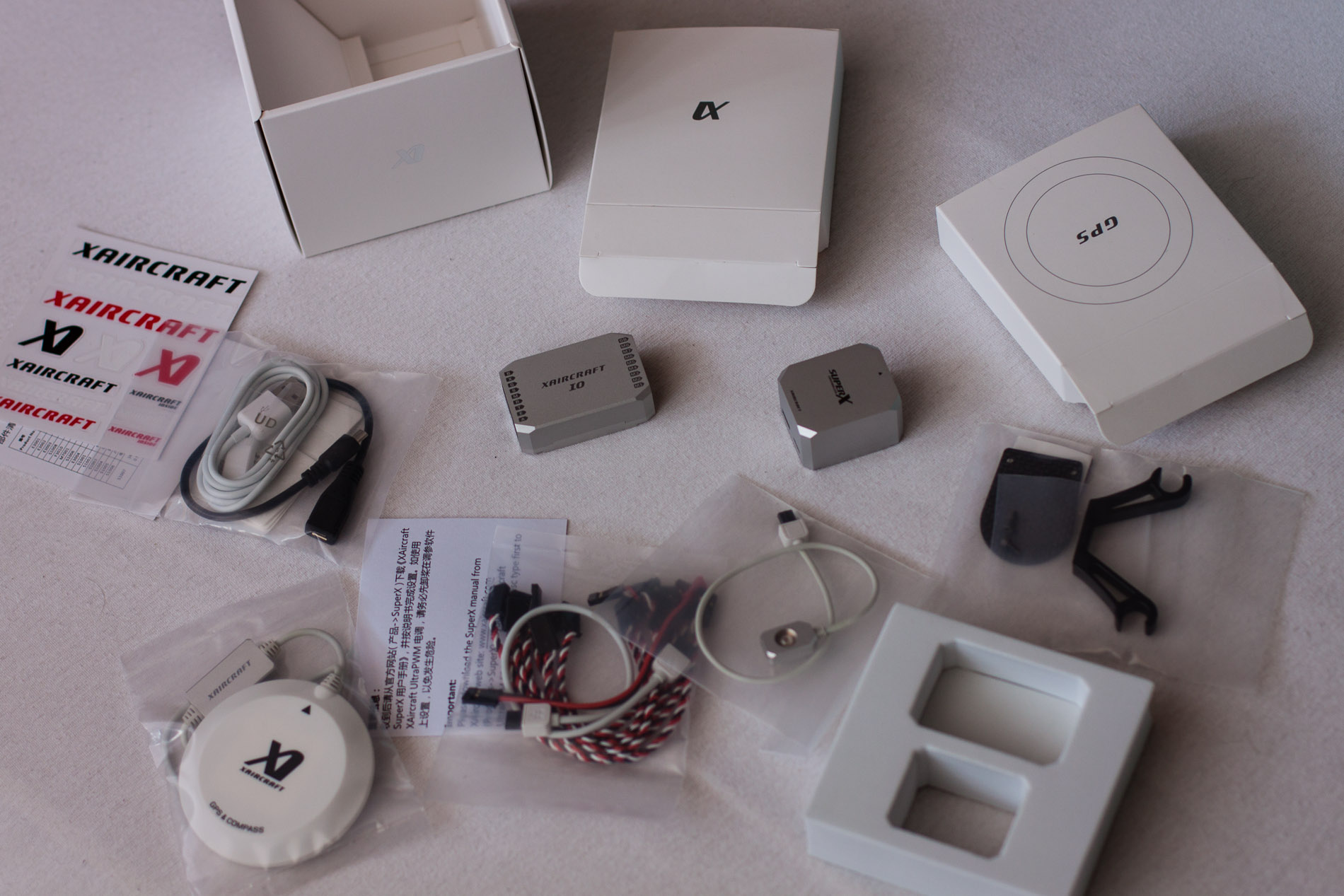
Die Komponenten der SuperX

- Die Flight Control macht die eigentliche Arbeit und verbindet sich über ihr Bus System mit der I/O Box, außerdem besitzt sie einen µUSB Port, über den sich ein PC mit ihr verbinden kann. Zum einen meldet sich die SuperX als USB Massenspeicher, auf dem die Software zur Konfiguration (direkt ohne Installation von dort startbar), die Log-Dateien der letzten Flüge sowie einige Diagnosedateien liegen, zum anderen kommuniziert die Software über USB mit dem FC, um getätigte Einstellungen zu übertragen. Die Software ist ein Binary Blob für das Windows Betriebssystem, funktioniert mit wine aber auch ohne Einbußen unter Linux (und somit vermutlich auch Mac OS X). Die Benutzeroberfläche ist auf englisch (voreingestellt) oder chinesisch einstellbar und weist auch eine gewisse Qualität der Übersetzung auf – also nicht nur durch einen automatischen Übersetzer geschickt.
- Die I/O Box ist die zentrale Einheit für alle Ein- und Ausgaben. Sie selbst wird per Bus-System an die FC angeschlossen und führt diesen auch auf 2 weiteren Buchsen hinaus, außerdem lässt sich die Status LED hier anstecken. Hier wird die Einheit auch mit Strom (direkt an den LiPo mit 3s-6s), den Steuerkanälen vom Funkempfänger, dem GPS und den ESCs (Motorcontrollern) verbunden.
- Die GPS / Kompass Einheit hat im Gegensatz zu den anderen Komponenten kein Aluminium Gehäuse und sollte etwas abseits der starken Ströme auf leicht erhöhter Position angebracht werden.
- Die Status LED (rot / grün) dient dazu, den Benutzer über den Betriebszustand zu informieren.
Varianten der SuperX
Die FC gibt es in 3 Ausbaustufen – Basic, Standard und Professional. Sie unterscheiden sich ausschließlich dadurch, wie viele Rotoren angeschlossen werden können und welche Bauform somit umsetzbar ist.. Dabei ist die Hardware und Software jeweils identisch und die Ausbaustufen werden als IP Cores mit Lizenzschlüsseln freigeschaltet – somit ist ein Upgrade einer FC auf die nächstgrößere Stufe auch möglich, ohne das Gerät einschicken zu müssen.
Xaircraft X650 Pro als Testsetup
Da ein Hexa- oder Octakopter schon wegen der Konstruktion deutlich ruhiger in der Luft liegt als ein Quad, wollte ich einen Quad testen, um zu sehen, wie gut die SuperX diesen in der Luft stabilisiert – gerade beim Durchfliegen der von ihm selbst verursachten Turbulenzen im Sinkflug. Ich bekam also den X650 Pro mit SuperX Basic als Testobjekt vorgesetzt, welchen es so als ARF (almost ready to flight) zu kaufen gibt. Lediglich Akku, Fernsteuerung und Empfänger sind in diesem Bundle nicht enthalten.
Das Sende- und Empfangssystem war eine kleine 4-Kanal Spektrum, welche außer den beiden Steuersticks keine weiteren Befehle an den Kopter übermitteln kann – interessant, denn ich wollte mich ja von den fortgeschrittenen Autopilot-Eigenschaften überzeugen – meine MultiWii bräuchte für Höhe und/oder Position halten bereits 2 weitere Kanäle um diese Flugmodi dem Kopter mitzuteilen. Doch Xaircraft löst das Problem auf sehr angenehm pragmatische Art- und Weise. Die Höhe wird gehalten, indem man Throttle auf Mittelposition bringt, die Position wird 3 Sekunden nach der letzten Eingabe(veränderung) automatisch gehalten. Man kann die Funke somit im wahrsten Sinne des Wortes weglegen und den Kopter vergessen, während man sich auf dem Flugfeld der Bremsen entledigt. Ausserdem bleiben so weitere der bis zu 8 verfügbaren Kanäle für andere Funktionen und Betriebsmodi verfügbar – gerade bei MultiWii stößt man schnell an die Grenzen, wenn man alle Zusatzfunktionen auf einem 8-Kanal Tranmittersystem abbilden möchte.
Hier kommt allerdings auch schon der erste kleine Nachteil der SuperX zum Vorschein. Jeder Kanal des Empfängers wird mit seinem eigenen 3-adrigen Servokabel an die FC angeschlossen, bei 8 Kanälen also 8 Kabel, die nicht nur etwas Gewicht auf die Waage bringen, sondern auch die Verkabelung erschweren und Raum für Fehler zulassen. Die Möglichkeit, das PPM-Summensignal mit allen Kanälen über ein Kabel zu empfangen, wäre sicher eine sinnvolle einzubauende Funktion, die per Firmwareupdate nachgereicht werden könnte.
Testflug
 Zuerst muss der Kopter scharf geschaltet werden, die SuperX erwartet, dass dazu beide Sticks nach unten in die Mitte zusammengeführt werden (zumindest bei der vorhandenen Mode 2 Fernsteuerung). Der linke Stick nach unten/rechts, der rechte nach unten/links.
Zuerst muss der Kopter scharf geschaltet werden, die SuperX erwartet, dass dazu beide Sticks nach unten in die Mitte zusammengeführt werden (zumindest bei der vorhandenen Mode 2 Fernsteuerung). Der linke Stick nach unten/rechts, der rechte nach unten/links.
Das Starten kann auf 2 Arten erfolgen. Entweder man hebt durch Erhöhen des Throttles ganz normal ab, oder man bewegt den Stick direkt in Mittelposition, um den Autostart zu initiieren. Bei letzterem hebt der Kopter behutsam selbst ab und steigt auf eine Höhe von ca. 1,5m – gerade genug um aus dem Bodeneffekt heraus zu kommen – und hält die Höhe vollautomatisch – unabhängig davon, ob und wie viel Zuladung in Form von Kamera und co angebracht worden ist.
Mir scheint das Throttle ohnehin abstrahiert zu sein. Während Multiwii im normalen Modus Throttle 1:1 in Umdrehungszahl der Rotoren umsetzt, scheint die SuperX das Gas als relativen Input zu verstehen, alles kleiner als Mittelstellung ist ein Sinkflug einstellbarer Geschwindigkeit, alles über Mittelstellung ein Steigflug. Das macht es sehr intuitiv zu fliegen, erschwert aber auch die Möglichkeit die maximale Steiggeschwindigkeit zu ermitteln. Mehr als 6 m/s Steigrate war nicht zu erreichen im normalen Betriebsmodus (den ich mangels weiterer Steuerkanäle nicht umstellen konnte), obwohl Motoren und ESCs von ihren Leistungswerten deutlich mehr Power haben müssten.
Die restliche Steuerung ist identisch zu anderen Koptern, die ich bereits geflogen bin – Pitch / Roll werden im normalen Modus begrenzt, was Kunstflug zwar verhindert, es aber ermöglicht, sich nicht um die Steuerung des Kopters selbst kümmern zu müssen, sondern darauf, wohin man fliegen möchte. Bewege ich Roll mit einem Vollausschlag nach rechts, legt sich der Kopter etwa 40° nach rechts und fliegt zügig in die angegebene Richtung, lasse ich den Stick los, stellt er sich nicht nur wieder gerade, sondern neigt sich in die entgegengesetzte Richtung, um der Bewegung entgegenzuwirken und den Kopter zu stoppen. Nach 3 Sekunden ohne Eingabeveränderung geht er wieder in den Positionshaltemodus über und verbleibt an Ort und Stelle.

Da ich den Kopter nicht nur zum Spaß geflogen bin, sondern testen wollte, was in der FC drin steckt, hab ich ihn an dem Tag bei mittlererm böigen Wind in ~4m auf Wipfelhöhe einer Buschreihe seine Position halten lassen. Also genau dort, wo zusätzlich zu den Windböen auch einige Verwirbelungen zu erwarten sind und ich war echt beeindruckt. Trotz der gemeinen Testbedingungen ist er geschätzt kaum 5-10cm (!) in jede Bewegungsrichtung von seiner zu haltenden Position abgewichen – stand also förmlich in der Luft festgenagelt. Das kann kaum nur an der GPS Position festgemacht werden, da werden intern bestimmt auch die Werte des Accelerometers und des Gyroskops verwendet. Hiervon ist die MultiWii noch meilenweit entfernt. Das funktioniert so gut, dass man den Kopter wirklich in der Luft parken kann, um sich dann ganz der Ausrichtung der Kamera zu widmen, wenn man Luftfotografie betreiben möchte.
Landen kann man auf die gleichen beiden Varianten durchführen, entweder manuell oder Auto-landing, dabei hält er die Position, sinkt langsam, bis er den Boden berührt und regelt dann die Motoren nach dem Aufsetzen langsam herunter und disarmt den Kopter, wenn das Gas danach auf 0 heruntergezogen wird. Was ein bisschen gefährlich erscheint ist, dass er den Kopter ebenfalls im Flug disarmt, wenn man das Gas 3 Sekunden lang auf 0 stehen hat. Er sinkt dann also 3 Sekunden lang kontrolliert gerade ausgerichtet und stürzt dann ab. Auch ein Punkt, wo durch ein Firmwareupdate noch Verbesserungspotential erkennbar ist. Man sollte bei einem kontrollierten Sinken tunlichst darauf achten, das Gas nicht auf 0 einzustellen, ggf. durch ein Mixer Setup an der Funke.
Die anderen Betriebsmodi und Automatiken werde ich testen sobald mein Hexakopter auch auf die SuperX umgerüstet ist, dann kann ich auch mehr zu Kompatibilität mit anderen Transmittersystemen sagen
Fail(safe) mode
Extrem gut gefallen hat mir auch der Safe Mode, welcher in der Konfigurationssoftware eingestellt werden kann. Bei Abriss der Funkverbindung, Abschalten der Fernsteuerung kann die SuperX mehrere Manöver ausführen:
- Auf eine sichere* Höhe gehen, return to home, landen
- Auf eine sichere* Höhe gehen, return to home, schweben
- Auf eine sichere* Höhe gehen, schweben
- an aktueller Position landen
* Die sichere Höhe ist in der GUI ebenfalls konfigurierbar und ist auf 15m voreingestellt.
Fazit
Ich finde, die SuperX ist eine sehr solide und durchdachte Flugsteuerung mit guten Flugeigenschaften und einem extrem guten Autopiloten. In Flugverhalten und Konfiguration ist sie sowohl für Anfänger geeignet als auch für Leute, deren Primärfokus nicht das Fliegen selbst sondern das Nutzen einer Aerial Platform ist. Leute, die die rohe Kraft ihres Kopter spüren wollen und Arobatik fliegen wollen, können dies mit der FC ebenfalls tun, wären aber mit einem anderen Produkt deutlich billiger dran, bei gleicher Leistung – es sei denn, man möchte sich auf einen zuverlässigen Panikmodus bei Kontrollverlust verlassen können.