Das neue GPS ist eingetroffen und kann im Trockentest am Notebook angeschlossen schon deutlich mehr überzeugen als das bisher verwendete FMP04 von flyduino mit MTK Chipsatz. Erstanden habe ich dieses bei rc-timer: u-Blox CN-06 GPS Receiver V2.0.

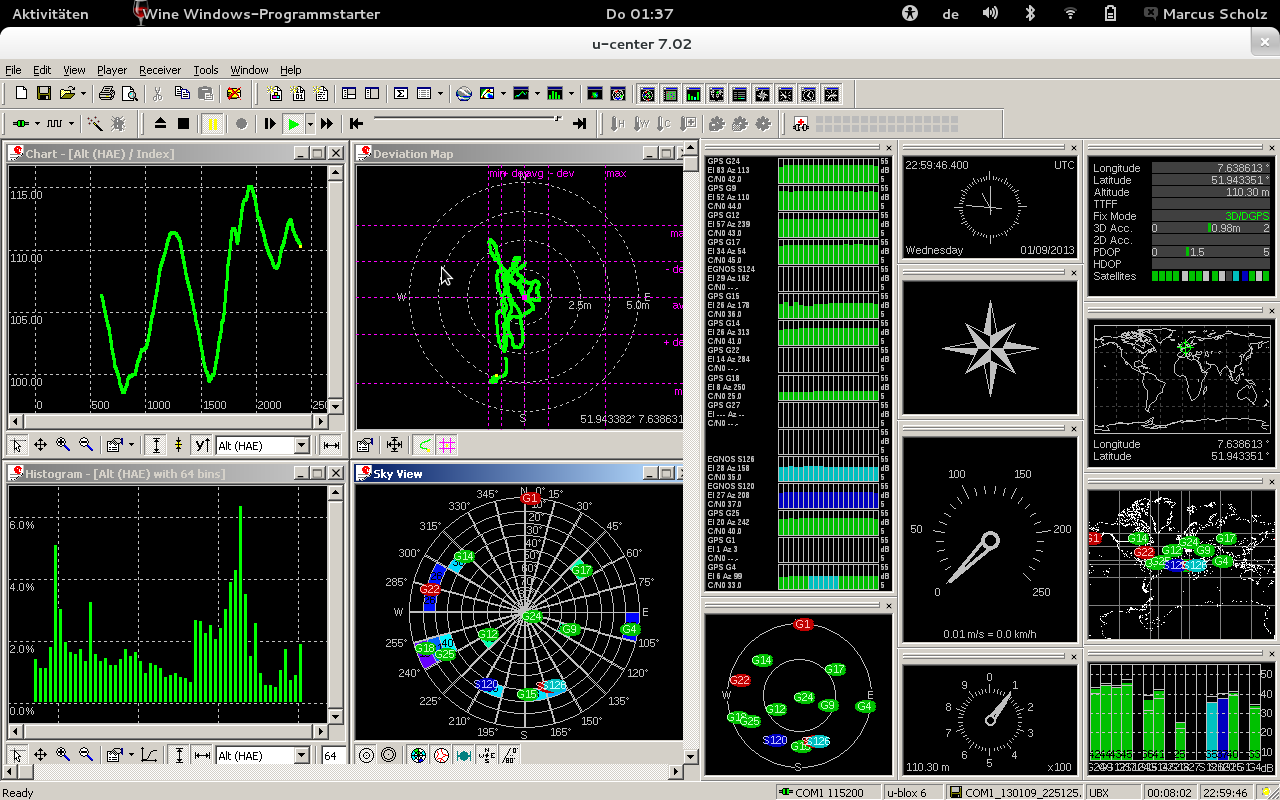
Ich habe hierzu die propietäre ublox eigene Software, das u-center verwendet, welches wunderbar unter wine funktioniert, wenn man als normaler User Rechte für die seriellen Konsolen hat (bei Fedora sind das die Gruppen dialout und tty).
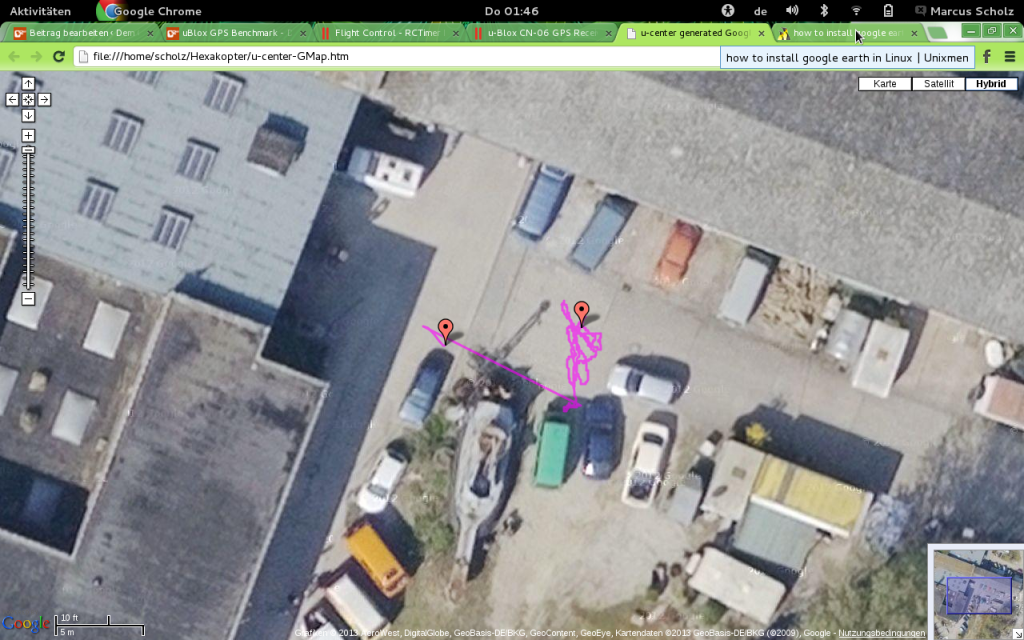
Mithilfe dieser kann man sich direkt über einen USB-FTDI an den seriellen Port des GPS anklemmen und direkt damit kommunizieren, um die Config zu ändern oder die gelieferten Positionsdaten und Debugdaten auswerten zu können.
Ich habe ich die serielle Schnitstelle UART1 von 9600 auf 115200 baud eingestellt und für ‚Protocol in‘ und ‚Protocol out‘ „‚0 UBX“ angegeben. Bei NAV wurde als Dynamic Platform Model „pedestrian“ gewählt und bei RATE die ‚Measurement Time‘ auf „200ms“ gesetzt, um 5Hz Updaterate zu erreichen. Zuletzt noch bei SBAS ‚PRN Codes‘ auf „Autodect“ geändert und das Häkchen bei ‚Apply integrity information‘ gesetzt.
Die Config, die sich mit der ublox u-center Software volatile oder permanent hochgeladen werden kann, kann man sich hier runterladen: ublox-c1024
Nun muss ich im nächsten Schritt noch herausfinden, wie ich diese Erkenntnisse auf die GPS-init Sequenz für ublox GPS Geräte in der Multiwii Software einfließen lassen, bzw. welche Settings diese per default setzt und wie brauchbar diese sind. Die Infos gibts dann im nächsten Eintrag zu dem Thema